DL| SSD, RetinaNet, DETR, CornerNet, CenterNet
in Blog / DL on Ssd, Retinanet, Detr, Cornernet, Centernet
SSD, RetinaNet, DETR, CornerNet, CenterNet
BoostCampAITECH
SSD
YOLO VS SSD
- YOLO 단점
- 7x7 그리드 영역으로 나눠 Bounding Box prediction 진행 → 그리드보다 작은 크기의 물체 검출 불가능
- 신경망을 통과하며 마지막 feature만 사용 → 정확도 하락
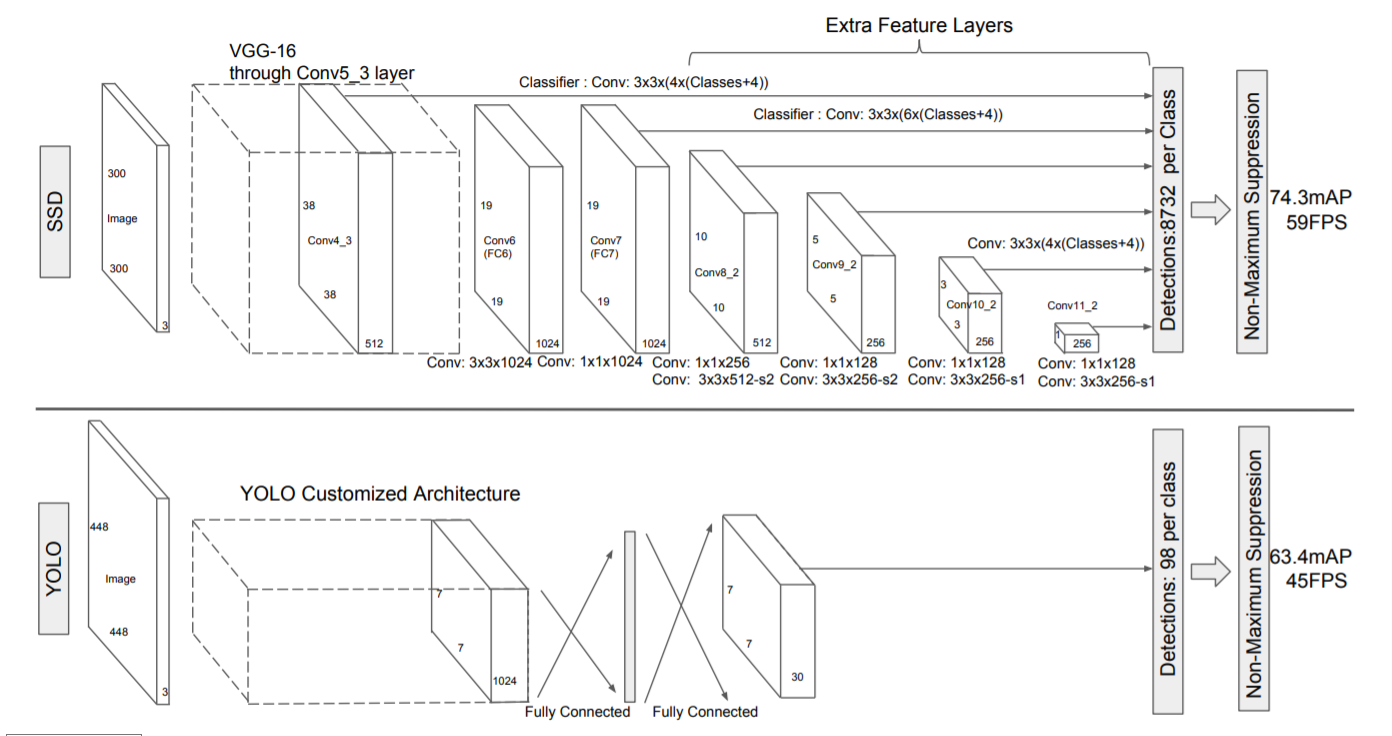
- SSD 특징
- Extra convolution layers에 나온 feature map들 모두 detection 수행
- 6개의 서로 다른 scale의 feature map 사용
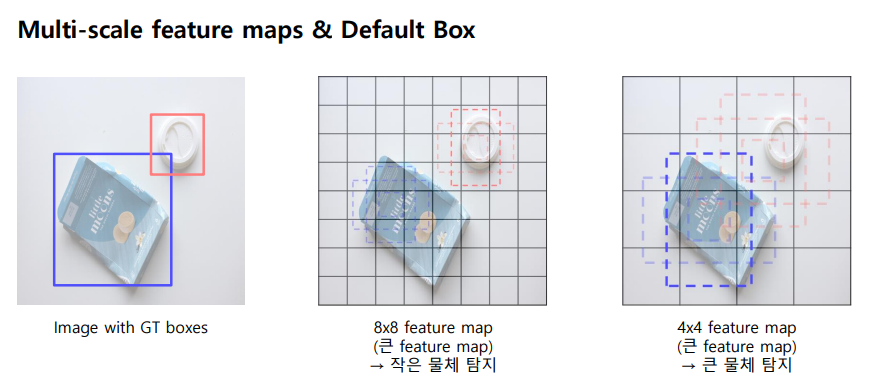
- 큰 feature map(early stage feature map)에서는 작은 물체 탐지
- 작은 feature map(late stage feature map)에서는 큰 물체 탐지
- fully connected layer 대신 convolution layer 사용하여 속도 향상
- Default box 사용
- 서로 다른 scale과 비율을 가진 미리 계산된 box 사용
- Extra convolution layers에 나온 feature map들 모두 detection 수행
- Network
- VGG-16(Backbone) + Extra Convolution Layers
- 입력 이미지 사이즈 300x300
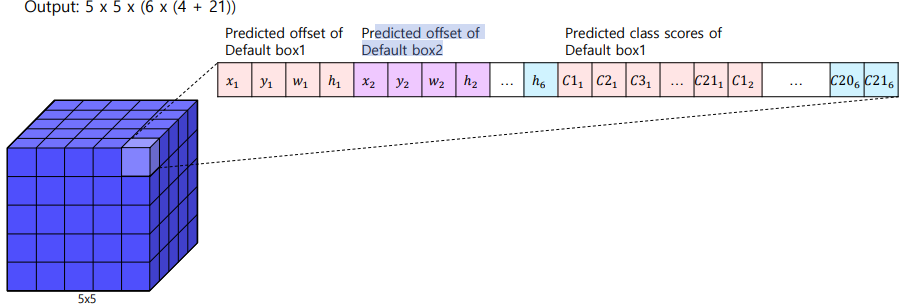
Multi-scale feature maps
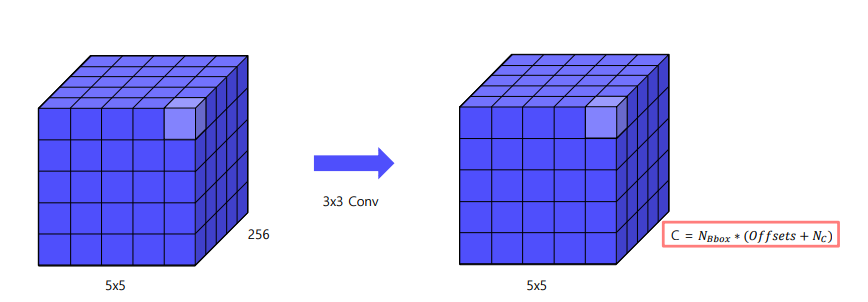

- 채널의 개수 = box의 갯수 * (offset + box의 클래스)
- offset = cx, cy, w, h(4)
- N_C = num classes(20) + background(1)
- N_bbox
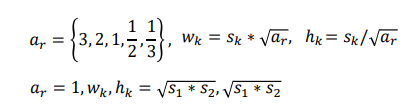
- Different scale per feature maps (𝑆𝑚𝑖𝑛 = 0.2, 𝑆𝑚𝑎𝑥 = 0.9, 𝑚 = 6)

Differenct aspect ratio
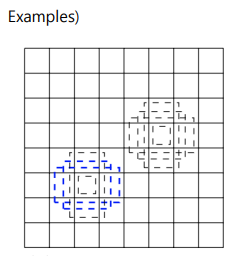
Examples
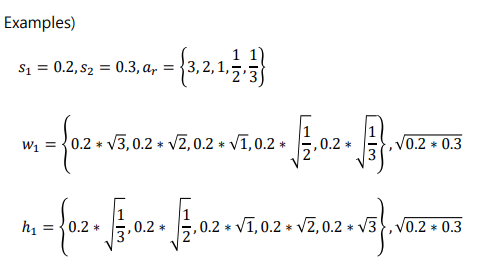
6 default boxes per each cells(직사각형 5개, 정사각형 1개, 총 6개의 서로 다른 비율의 box를 만듦)
Default Box
- feature map의 각 cell마다 서로 다른 scale, 비율을 가진 미리 정해진 box 생성
- Faster R-CNN의 anchr box와 유사함
- 여러 scale의 feature map에 맞게 적용시킨 개념
Multi-scale feature maps & Default Box
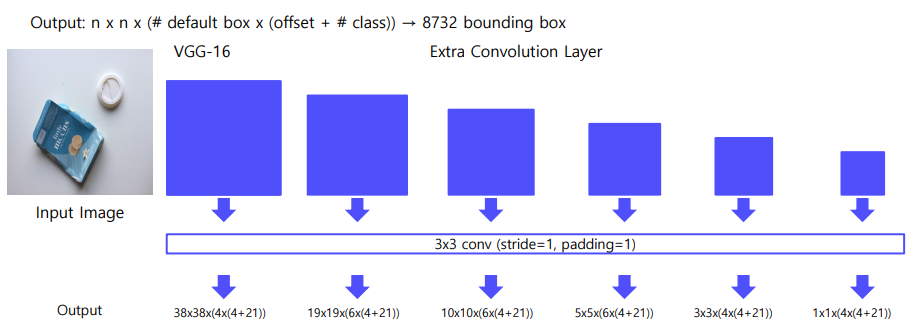
- ssd는 이와 같은 방식으로 8732개의 bounding box를 만듦
Training
- Hard negative mining: 모델이 예측하기 어려운 sample을 추출(주로 FP)한 뒤, 학습 데이터에 포함시켜 FP에 강건하도록 학습
- Non maximum suppression
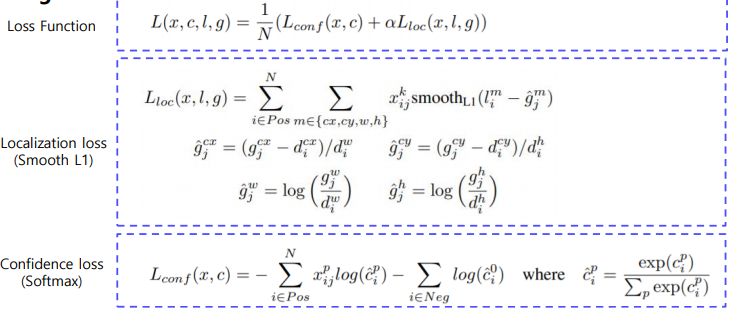
Loss
장점과 단점
- 장점
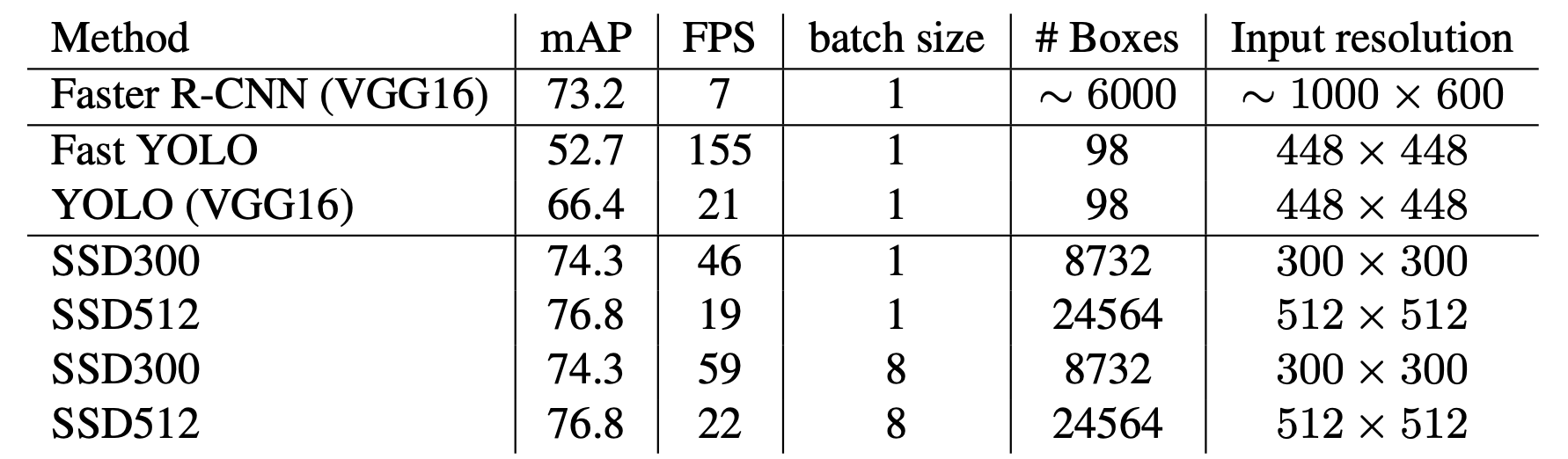
- YOLO V1보다는 FPS 소폭 상승 mAP 크게 상승
- end-to-end 학습, 저해상도 이미지에서는 높은 정확도
- YOLO와 달리 FCN 미사용→FCN사용시 디테일한 정보가 사라지는 문제점 해소, 파라미터 개수 감소로 처리속도 빠름
- 단점
- 작은 크기는 여전히 못함
- 작은 물체는 앞쪽 layer에서 생성된 feature map을 이용하여 object detection을 수행하므로 앞쪽은 depth가 깊지 않음
- 그래서 저자는 Data Augmentation 사용
- 작은 크기는 여전히 못함
RetinaNet
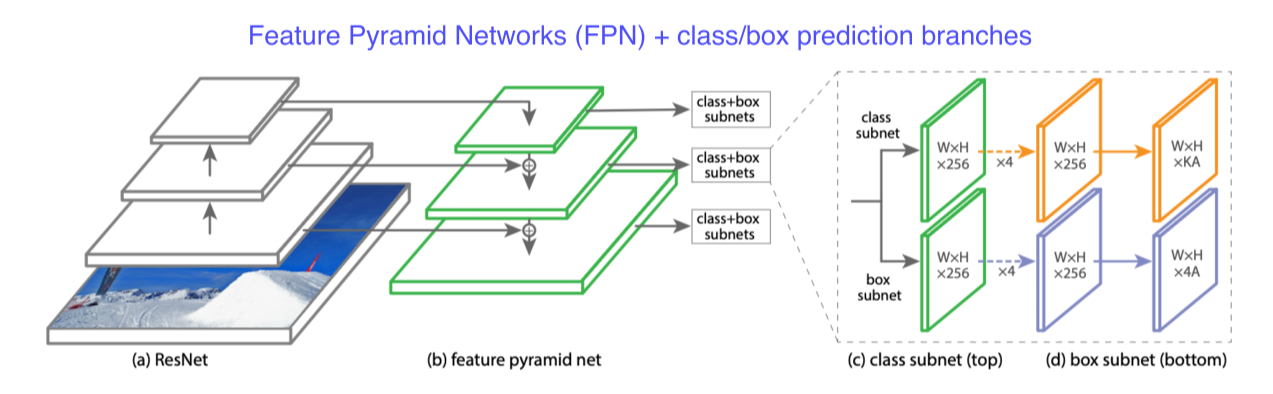
- low level의 특징 layer들과 high level의 특징을 둘 다 활용하면서도 각 scale별로 물체를 잘 찾기위한 설계
- U-Net과는 달리 concat이 아닌 add
- class, box head가 각각 구성돼서 classification과 box regression을 dense하게 각 위치마다 수행
- SSD보다 빠르면서 성능이 좋음
Focal Loss
one stage detector는 RoI Pooling이 없기 때문에 모든 영역에서의 loss가 계산되고, 일정 gradient가 발생, 실제 필요한 것은 object에 대한 bbox인데 배경도 만들어지므로 class imbalcne가 발생
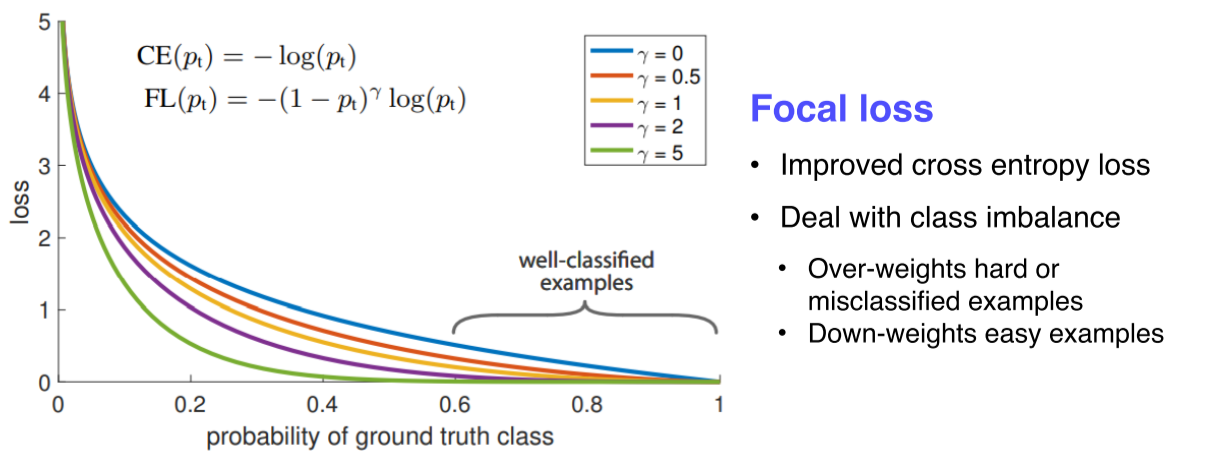
- γ가 클수록 잘 맞추면 gradient가 0에 가까워 무시되고, 못 맞추면 sharp한 gradient가 발생해 큰 영향을 줌
- 어렵고 잘못 판별된 예제들에 대해선 강한 weight를 주고, 쉬운 것들에 대해서는 작은 weight를 줌
DETR
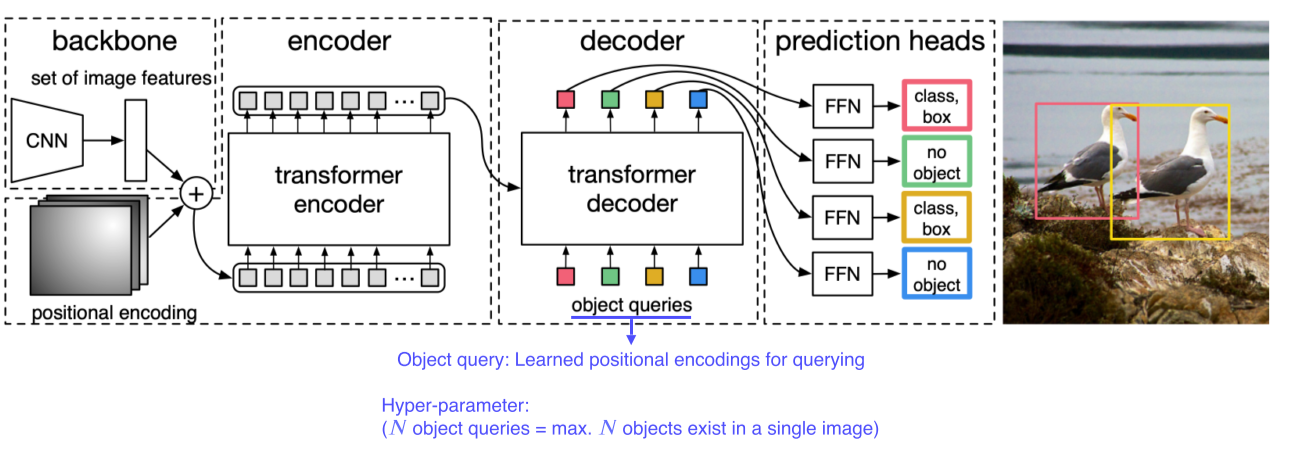
- Transformer를 object detection에 적용
- CNN의 feature map과 각 위치를 multi-dim으로 표현한 encoding을 섞어 입력 토큰으로 만듦
- Encoding된 feature들을 decoder에 넣으면, query(각 위치)에 해당하는 물체가 뭔지, bbox에 대한 정보와 함께 파싱되어 나옴
Further reading
- 요즘엔 b-box regression을 하지 말고 다른 형태의 데이터 구조로 탐지가 가능한지 연구중이라고 함 → CornerNet, CenterNet
CornerNet
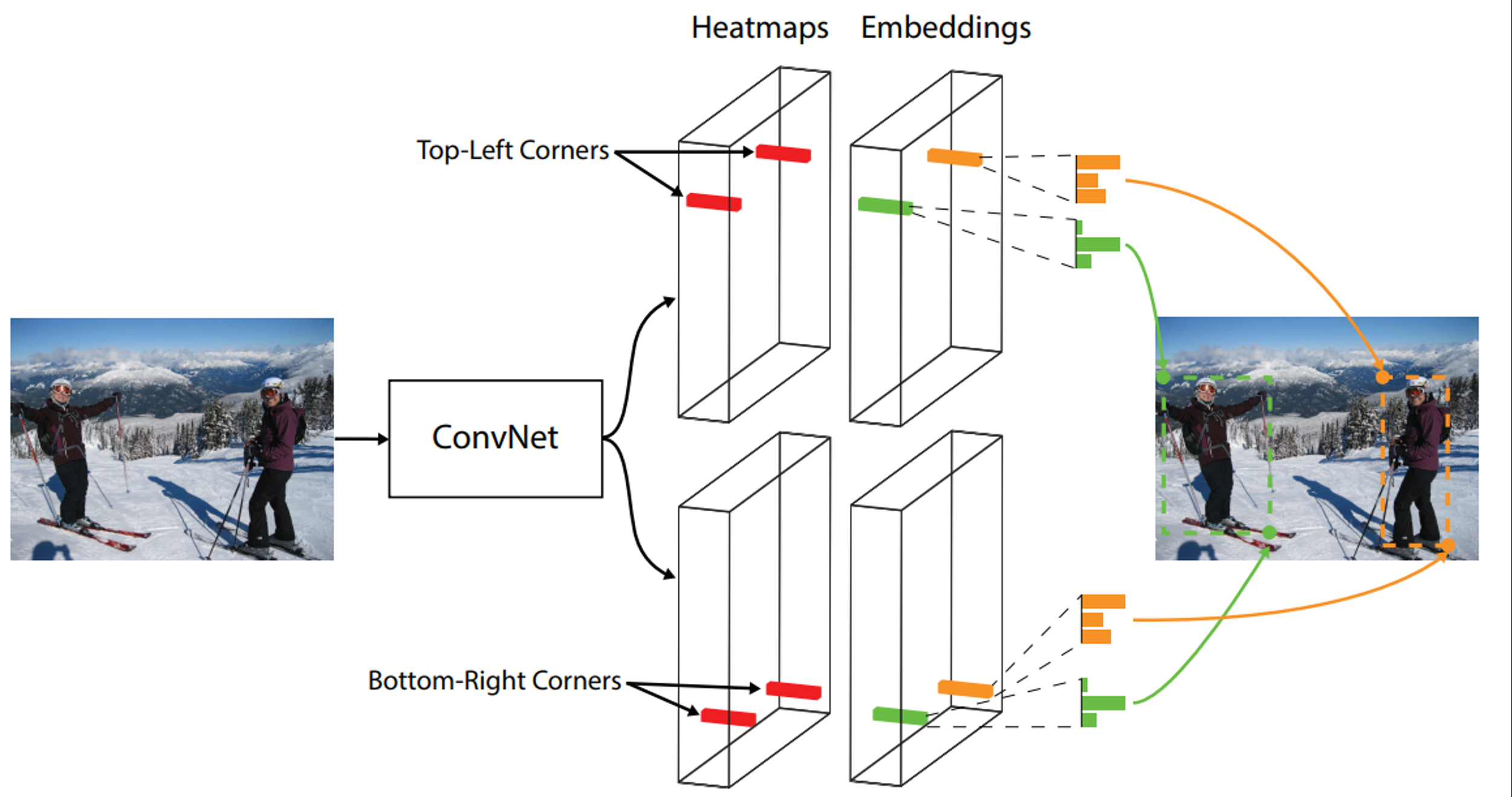
기존에는 Bounding box는 top-left, bottom-right인데 backbone에서 나온 feature map의 네가지 헤드를 통해 heatmap을 통한 각각의 점들을 detection하여 top-left, bottom-right corner를 검출
embedding head를 통해 각각의 poiont들을 표현함
학습할 때 같은 object의 top-left, bottom-right corner에 대해 embedding이 서로 가깝게 되도록 학습하고 다른 object의 corner는 embedding이 멀어지도록 학습
CenterNet
- CenterNet의 Bounding box = {Top-left, Bottom-right, Center} points를 추가해서 학습을 진행
- 또 다른 variant로 width, height, center만 있으면 최소한의 정보롤 detection이 가능한 방법
