DL| ViT
ViT정리
Vision Transformer(1) 논문리뷰: An Image is Worth 16X16 Words: Transformers for Image Recognition at Scale BoostCampAITECH
Vision Transformer(ViT)

1. Flatten 3D to 2D, Learnable한 embedding 처리
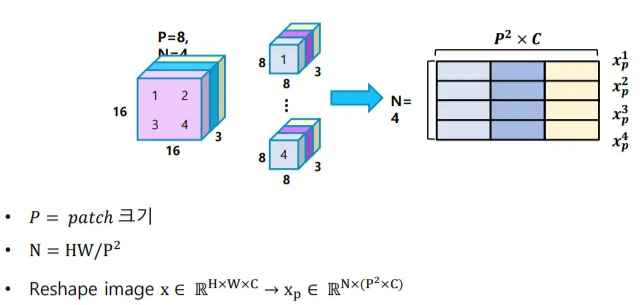
패치 크기가 P일 때, 하나의 이미지 는 각 패치가 flatten되어 구성된 시퀀스가 됨(N은 패치의 개수)
이미지 크기가 H=W=16, P=8, C=3일 때
- 패치의 개수(N) 4개의 8x8x3=192 차원의 텐서로 이뤄진 시퀀스가 됨
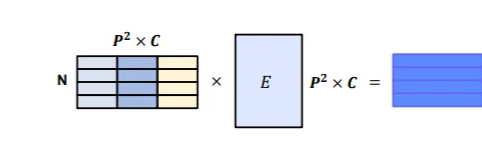
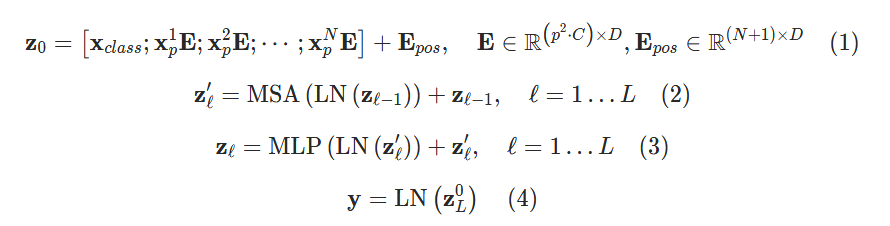
이후 시퀀스의 각 요소 별로 임베딩을 위한 linear Projection(아래식)을 사용하여 D차원에 매핑

- Transformer 모델과 마찬가지로 모델 전체의 차원은 D로 통일
- E: learned embedding matrix를 의미
- 이 linear projection의 output을 patch embeddings
즉, H=W=16, P=8인 경우에 patch embedding 결과 4x192=768 크기의 패치 임베딩 행렬이 도출됨
2. Add position embedding, class embedding
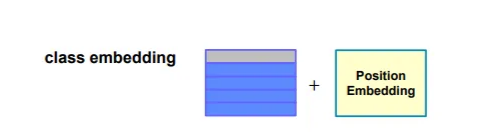
class embedding을 추가([CLS]Token)
- BERT의 class token과 마찬가지로 입력 시퀀스 맨 앞에 학습 가능한 임베딩 파라미터를 붙임()
- class token은 이것의 인코더 출력이 () 전체 이미지의 representation을 나타내는 특별한 token으로 최종단의 classification을 위한 MLP layer가 에 달리게 됨
- 대용량 데이터 셋을 이용한 사전 훈련시에는 에 2-layer MLP가 달리고 fine-tuning시에는 1-layer가 달리게 됨
- 결과적으로 class token을 위한 embedding은 1x192 크기의 텐서가 되고 왼쪽에 붙어서 최종 텐서의 크기가 (4+1)x192가 됨
에서 +1인 이유

- embeding patche 시퀀스 맨 앞에 [CLS] token()을 concat함
position embedding 추가
시퀀스 각 요소의 위치 정보를 알려주기 위해서 더해줌

- 5x192 크기의 텐서로 1차원 position embedding
3. Transformer
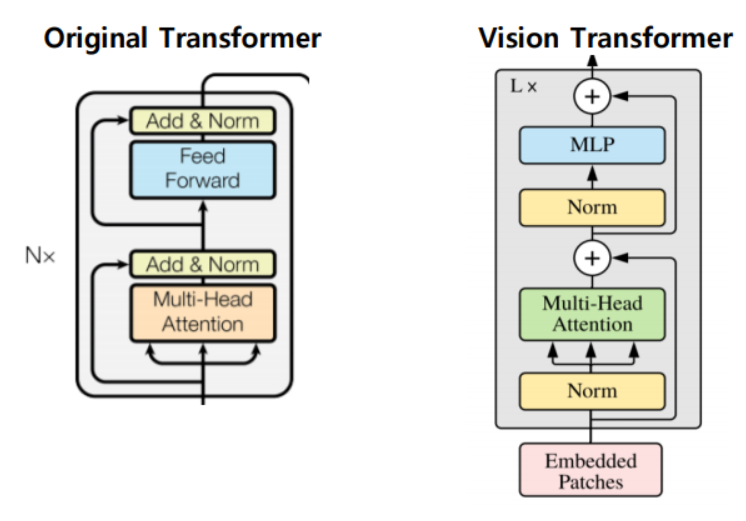
ViT에서의 Transformer encoder는 기존 Transformer 대비 순서가 약간 변형된 순서로 진행됨
Multi-headed self-attention(MSA) 및 MLP block으로 구성
LayerNorm(LN)은 모든 block 이전에 적용되고 residual connection은 모든 block 이후에 적용
Multihead self attetnion
Multihead self-attention과 관련되서는 기존 Transformer와 거의 비슷하게 동작
입력 시퀀스 라면 각 헤드별 self attention은 아래와 같이 동작, 는 헤드별 feature 차원으로 전체 에서 헤드 개수를 나눠줌

이후 기존 Transformer 모델의 feed-forward networks와 같이 각 헤드별 출력 를 이어붙여서 선형 변환하여 최종적으로 D차원을 만듦

4. Predict
Class embedding vector 값을 MLP head에 입력시켜서 최종 결과를 추출함

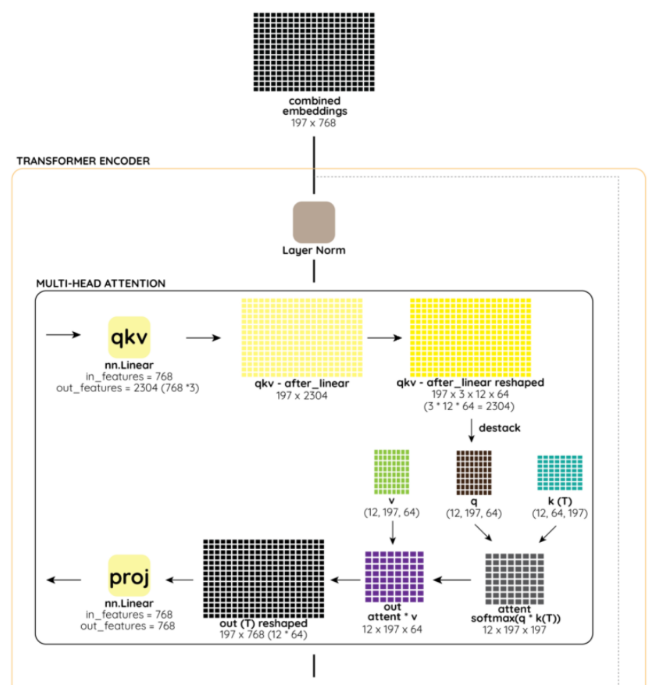
Encoder의 전체적인 구조
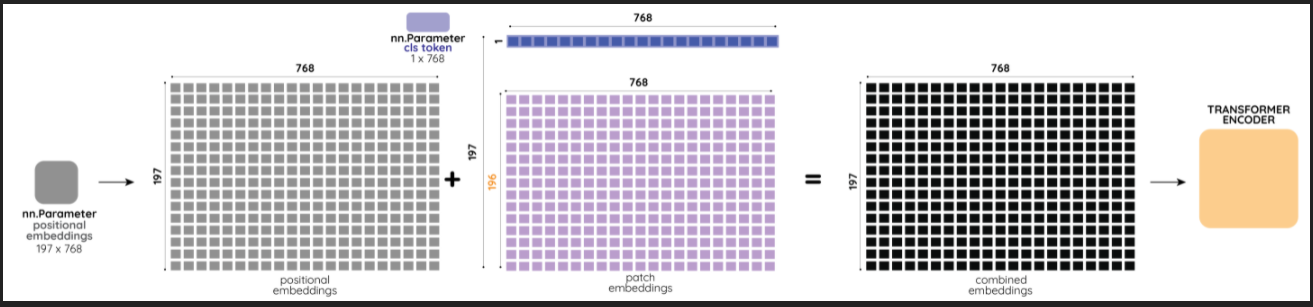
- H=W=224, P=16
- patch embedding 196x768
class token이 추가되어 (196+1)x768
- 768차원의 Q, K, V 텐서 구성 위해 768x3=2304크기의 선형 변환을 적용
- 12 multi-head self-attention을 사용하므로 각 head당 Q, K, V 텐서의 크기는 768/12=64
- 이후 MLP block은 2-layer와 BERT에서 사용된 GELU(Gaussian Error Linear Unit) 비선형 활성화 함수가 사용됨
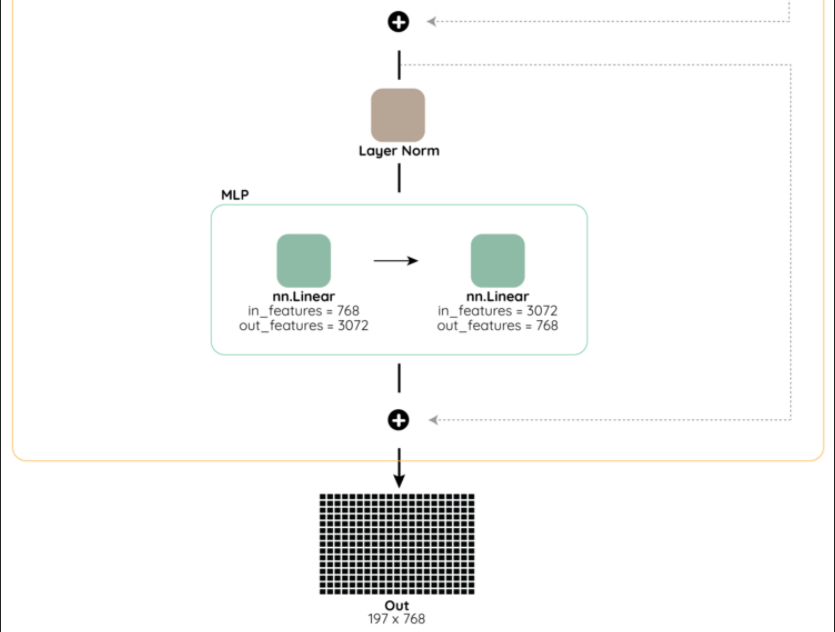
위와 같이 encoder를 적층하고, 마지막 encoder에 대해서 최종 분류를 위한 MLP 적용

Hybrid architecture
이미지 패치에 대해 바로 적용하기도 하고 CNN의 feature map에 대해서 ViT를 적용하는 것
입력 이미지가 아닌 입력 이미지가 CNN을 거친 feature map에 대해 패치를 구성하게 되는데 feature map 한 셀 별로 입력 이미지의 일정 부분에 대한 정보를 담고 있고 해상도가 낮아서 P=1의 패치 크기를 가질 수 있게 설계함
이런 경우 feature map의 공간 차원을 펼치고 D 차원으로 선형변환하면 됨, class token과 positional embedding은 똑같이 적용
문제점
- 굉장히 많은 양의 Data를 학습해야 성능이 나옴
- Transformer 특성상 computational cost가 큼
- 일반적인 backbone으로 사용이 어려움
Fine-tuning and Higher Resoultion
inductive bias? 많은 데이터에 대해 귀납적으로 문제를 풀고 싶어하고, 그 문제를 더 잘 풀기위해 설계된 모델/목적함수의 추가적인 가정을 말함
일반적으로 large-sclae 데이터셋에 대해 ViT를 pre-train하고 downstream task에 대해 fine-tuning하는데
이를 위해서 pre-trained prediction head를 제거하고 0으로 초기화된 feedforward를 추가함(K는 downstream calss의 개수)
Pre-train보다 높은 resoultion으로 fine-tuning하는 것은 종종 도움이 됨, 더 높은 resoultion의 이미지를 feed할 때 patch 크기가 동일하게 유지되므로 sequence length가 더 길어짐
Vision Transformer는 임의의 sequence length를 처리할 수 있지만 pre-trained position embedding은 의미가 없을 수 있음
따라서 원본 이미지에서의 위치에 따라 pre-trained position embedding의 2D interpolation을 수행함
Resolution 조정 및 patch 추출은 이미지의 2D 구조에 대한 inductive bias가 Vision Transformer에 수동으로 주입되는 유일한 지점
